Necesidad / desafío
Un fabricante de un brazo robótico necesita medir la fuerza y la torsión cuando el brazo levanta y coloca objetos.
Solución
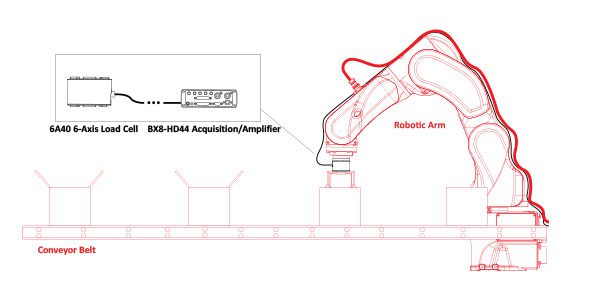
Interfaz suministrada Modelo 6A40A Celda de carga de 6 ejes con Adquisición / Amplificador de datos Modelo BX8-HD44.
Resultados
La celda de carga del eje 6A40-6 pudo medir todas las fuerzas y pares (Fx, Fʏ, Fz, Mx, Mʏ, Mz) y el amplificador / adquisición de datos BXB-HD44 pudo registrar, mostrar y graficar estas mediciones mientras enviar señales de salida analógicas escaladas para estos ejes al sistema de control del robot.
Materiales
- 6A40 Célula de carga de 6 ejes.
- BX8- Amplificador / Adquisición de datos que incluye software de configuración, registro, visualización y gráficos BlueDAQ.
- Brazo robótico y sistema de control del cliente.
Cómo funciona
- El cliente instaló una celda de carga de 6 ejes 6A40 entre la brida del robot y el sujetador del robot.
- La celda de carga de 6 ejes 6A40 se conectó al amplificador / adquisición de datos BX8-HD44.
- Salidas analógicas conectadas por el cliente a su sistema de control.
- Como resultado, el cliente ahora puede medir fuerzas y pares en 6 ejes y enviar una señal de salida analógica escalada a su sistema de control de brazo robótico.